چرخیدن چرخ سفت و سخت – Rolling of a Rigid Wheel
هدف از این مدل نشان دادن نورد خالص یک چرخ سفت و سخت در هنگام سرعت اولیۀ رو به جلو همراه با یک پشتیبانی معین در مورد این جهت است.

هدف از این مدل نشان دادن نورد خالص یک چرخ سفت و سخت در هنگام سرعت اولیۀ رو به جلو همراه با یک پشتیبانی معین در مورد این جهت است.
یک موتور متقاطع تکسیلندر پشتیبانی شده با یاتاقان هیدرودینامیکی مورد مطالعه قرار گرفته است. گشتاور شروع شده برای به کاربردن موتور به دور در دقیقه لازم اعمال میشود. گشتاور بارگیری هنگامی که موتور به سرعت بالا میرود روشن میشود. پس از شروع کار، موتور تحت فشار خود سیلندر به تنهایی کار میکند.
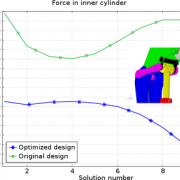
در سیستمهای پیچیدۀ مکانیکی، یافتن یک راه حل بهینه (یا حتی به اندازۀ کافی خوب) فقط از طریق بینش مهندسی یا رویههای آزمایش و خطا میتواند چالش برانگیز باشد. سپس استفاده از روشهای بهینهسازی ریاضی میتواند مسیری کارآمد برای طراحی بهتر باشد.
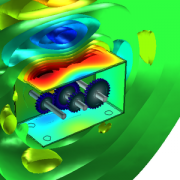
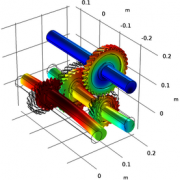
پیشبینی تشعشع نویز از یک سیستم پویا، طراحان را به درک مکانیسمهای متحرک در مراحل اولیۀ طراحی پیش میبرد. به عنوان مثال، گیربکس را در نظر بگیرید که در آن تغییر در سختی مش دنده باعث ایجاد لرزش میشود. این لرزشها از طریق محورها و اتصالات به محفظۀ گیربکس منتقل میشوند. محفظۀ ارتعاشی انرژی بیشتری را به مایعات اطراف منتقل کرده و در نتیجه تابش موج صوتی ایجاد میشود.
این مدل آموزشی تابش پرتو نویز از محل قرارگیری قطار چرخدندهای را شبیهسازی میکند. ابتدا، یک تجزیه و تحلیل دینامیک چندبدنه در حوزۀ زمان انجام شده تا ارتعاشات محفظه را با سرعت مشخص شده در محور محرک محاسبه کند. سپس، برای محاسبۀ سطح فشار صوت در قسمتهای نزدیک، دور و خارجی با استفاده از شتاب طبیعی محفظه به عنوان منبع سر و صدا، آنالیز آکوستیک با فرکانس انتخابی انجام میشود.
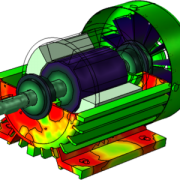
در لرزش مدل آموزشی یک موتور القایی، جریانهای گردابی توسط جریانهای هارمونیک زمانی موجود در سیمپیچ استاتور و چرخش روتور، در روتور القا میشوند. جریانهای القایی در روتور با میدان مغناطیسی که توسط سیمپیچها تولید میشود، برای تولید گشتاور حرکتی روی روتور تعامل دارد. شکاف هوا بین روتور و استاتور نامتقارن بوده و در نتیجه لرزش در موتور ایجاد میشود.
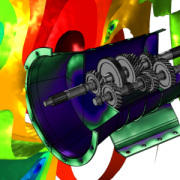
از گیربکس برای انتقال نیرو از یک موتور به چرخهای دیگر یا سیمهای همراه استفاده میشود که میتواند منجر به تابش سر و صدا به محیط اطراف شود. این امر به دلیل انتقال نیروهای جانبی و محوری ناخواسته روی یاتاقانها و استاتور و در عین حال انتقال نیرو از یک محور به طرف دیگر و همچنین لرزش اجزای انعطافپذیر مانند مش دندهها، یاتاقانها و استاتور است. با شبیهسازی و پیشبینی لرزش و تابش سر و صدا از گیربکس، طراحان میتوانند در مراحل اولیه بینش کسب کنند.
دستگاه فرمان گریز از مرکز برای کنترل سرعت ماشینهای چرخشی استفاده میشود. یكی از رایجترین كاربردها، كنترل RPM یک موتور با تنظیم منبع تغذیه است.
ژیروسکوپها برای اندازهگیری جهتگیری یا حفظ پایداری هواپیماها، فضاپیماها و وسایل نقلیۀ زیردریایی به طور کلی استفاده میشوند. آنها همچنین به عنوان حسگر در سیستمهای هدایت لختی استفاده میشوند.
در این مدل آموزشی، نحوۀ مدلسازی چندین روتور متصل از طریق چرخدندههای مارپیچ را با استفاده از ماژول Rotordynamics ، یک محصول اضافی به ماژول مکانیک ساختاری و کامسول مالتیفیزیک بیاموزید. هنگام مدلسازی روتورهای چرخدندهای، وجود دندهها در سیستم باعث ایجاد لرزشهای جانبی و پیچشی در روتورها میشود. فرض بر این است که مش چرخدنده الاستیک بوده و دارای یک مقدار سختی ثابت است.
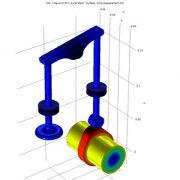
در این مثال، مکانیزم بازکردن شیر فنری متشکل از یک بازوی غلتان و یک ضامن شعاعی مورد بررسی قرار میگیرد. تمام اجزای سیستم به صورت سفت و سختی مدل شده و از طریق اتصالات منشوری، لولا و شکاف به یکدیگر متصل میشوند. اتصال ضامن دنبالکننده و همچنین سایر اتصالات مشترک با استفاده از گرههای داخلی در رابط Multibody Dynamics مدلسازی میشوند.

