

دینامیک اجسام
Multibody Dynamic
ابزاری برای طراحی و بهینه سازی سیستم های چند بخشی
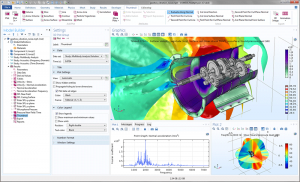
ماژول Multibody Dynamics موجود در نرم افزار COMSOL Multiphysics ، مجموعه ای پیشرفته از ابزارها را برای طراحی و بهینه سازی سیستم های مکانیکی سازه چند بخشی با استفاده از تجزیه و تحلیل المان محدود (FEA) فراهم می کند. ماژول شما را قادر می سازد تا سیستم های مختلط از اجسام انعطاف پذیر و سفت و سخت را شبیه سازی کنید ، جایی که ممکن است هر جسم در معرض جابجایی های بزرگ چرخشی یا انتقالی قرار گیرد. چنین تجزیه و تحلیل ها به شناسایی نقاط مهم در سیستم های چند بخشی شما کمک می کند ، بنابراین شما را قادر می سازد تا تجزیه و تحلیل های ساختاری را دقیق تر انجام دهید.
استفاده از کتابخانه اتصالات
کتابخانه ای از اتصالات از پیش تعریف شده در ماژول گنجانده شده است تا بتوانید روابط بین اجزای مختلف یک سیستم چند جسمی ، جایی که اجزاء به هم وصل شده اند به طوری که فقط نوع خاصی از حرکت بین آنها مجاز است را به راحتی و با قوت مشخص کنید. اتصالات دو مؤلفه را از طریق پیوست ها متصل می كنند ، در حالی كه یك مؤلفه به طور مستقل در فضا حركت می كند و بخش دیگر بسته به نوع مفصل ، محدود به یك حركت خاص است. انواع اتصالات در ماژول Multibody Dynamics به حدی عمومی است که می توانند هر نوع اتصال را مدل کنند. محققان و مهندسان می توانند از این طریق با استفاده از انواع مفصل زیر ، مدلهای دقیق مکانیک ساختاری چند بدنه را طراحی کنند:
| مفصل کشویی ۳D,2D | Prismatic (3D, 2D) |
| لولا ۳D,2D | Hinge (3D, 2D) |
| استوانه ای (سه بعدی) | Cylindrical (3D) |
| پیچ (سه بعدی) | Screw (3D) |
| مسطح (سه بعدی) | Planar (3D) |
| توپ (سه بعدی) | Ball (3D) |
| اسلات (سه بعدی) | Slot (3D) |
| اسلات کاهش یافته۳D,2D | Reduced Slot (3D, 2D) |
| مفصل ثابت۳D,2D | Fixed Joint (2D,3D) |
| اتصال فاصله دار ۳D,2D | Distance Joint (2D,3D) |
| اتصال یونیورسال(سه بعدی) | Universal Joint (3D) |
انعطاف پذیری کامل در تجزیه و تحلیل چندگانه
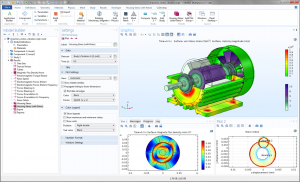
اجزای سیستمی که دچار تغییر شکل می شوند می توانند به عنوان انعطاف پذیر مدل شوند ، در حالی که سایر اجزا یا حتی بخش هایی از این مؤلفه ها می توانند سفت و سخت باشند. شما همچنین می توانید با ترکیب مدل ها در ماژول Dynamics Multibody با ماژول مواد غیرخطی سازه یا ماژول ژئومکانیکی ، طراحی و تجزیه و تحلیل دینامیکی چند قطعه متصل را ارائه دهید . در عین حال ، بقیه فیزیک هایی که می توانید با COMSOL Multiphysics و مجموعه ماژول های خاص برنامه کار کند ، با فیزیک شرح داده شده توسط ماژول Multibody Dynamics مانند اثرات انتقال حرارت یا پدیده های الکتریکی همراه نمایید.
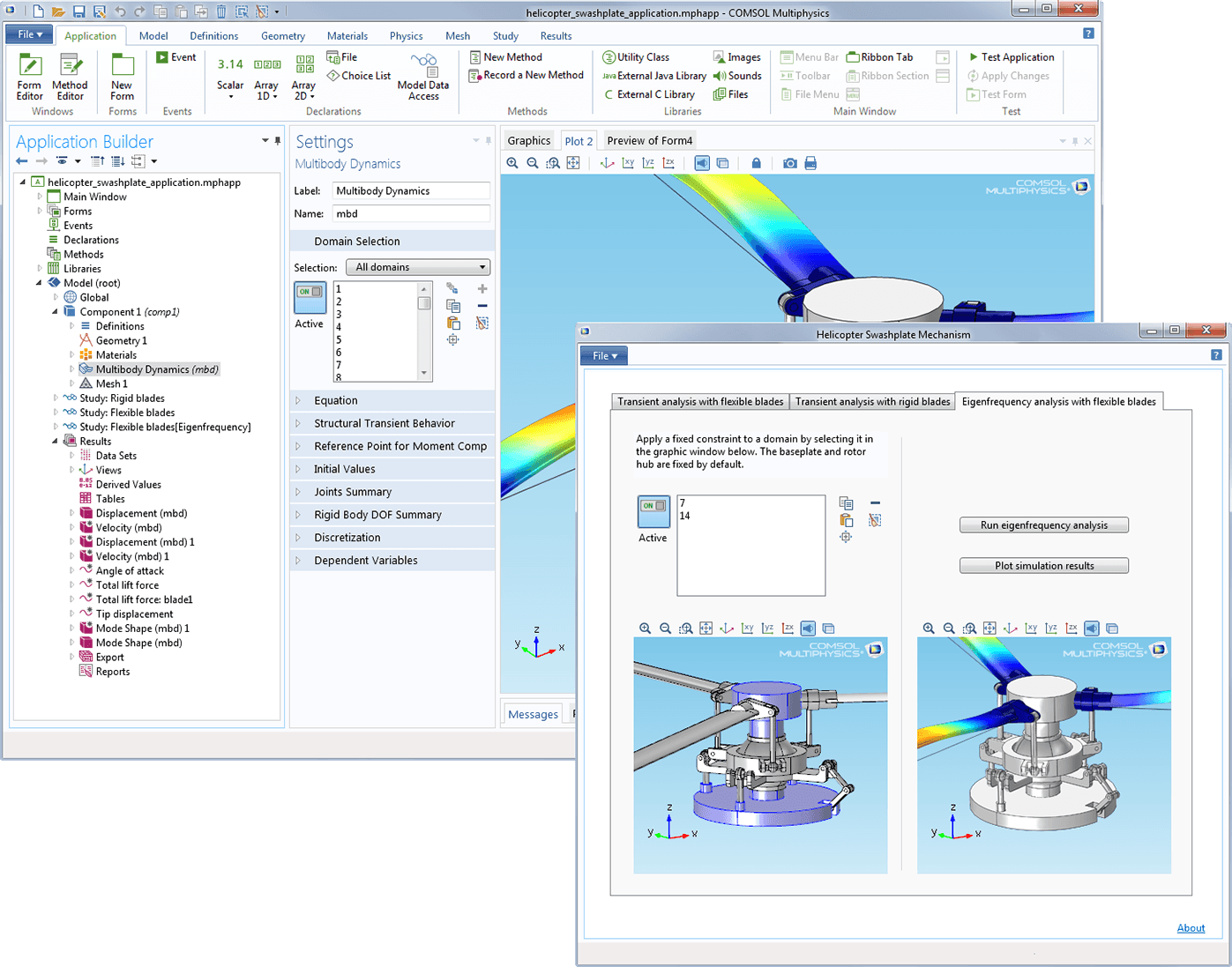
تجزیه و تحلیل گذرا ، دامنه فرکانس ، مقادیر ویژه ای ، و پویایی multibody ایستا را می توان انجام داد. به اتصالات می توان به چشمه های خطی / پیچشی با خاصیت میرایی ، نیروهای اعمال شده و لحظه ها اختصاص داد و حرکت را به عنوان تابعی از زمان تجویز کرد.
تجزیه و تحلیل و قابلیت پردازش بعد از پردازش شامل موارد زیر است:
جابجایی / چرخش نسبی بین دو مؤلفه و سرعت آنها
نیروهای واکنش و مومنتوم در اتصالات
چهارچوبهای مرجع مختصات محلی و جهانی
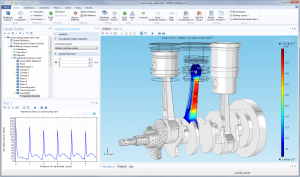
استرس و تغییر شکل در قسمت های انعطاف پذیر
تجزیه و تحلیل خستگی از قسمت های انعطاف پذیر با ترکیب با ماژول خستگی
غالباً ، حرکت بین دو مؤلفه به دلیل وجود یا عملکرد سایر اجسام جسمی محدود می شود. محدود کردن و قفل شرطی حرکت نسبی را می توان برای اتصالات مشخص کرد تا به طور کامل تعریف و مدل سازی این سیستم های پیچیده انجام شود. به عنوان مثال در رباتیک می توان حرکت نسبی بین دو بازو را به عنوان تابعی از پیش تعریف شده از زمان تعریف کرد. اتصالات همچنین می توانند دارای بهار باشند و عوامل میرایی مناسب را می توان در ماژول Dynamics Multibody وارد کرد.
قابلیت های ماژول
اتصالات می توانند مقید شوند تا دو عضو حرکت محدود دلخواه را داشته باشند
اتصالات را می توان قفل کرد تا حرکت نسبی بین دو عضو متصل به مقدار مشخص شده را مسدود کند
حالت فنری را می توان روی حرکت نسبی در یک مفصل ، چه در تعادل و چه به همراه تغییر شکل ، اعمال کرد
می توان سیستمهایelement Lumped از جرم ها ، میراگرها ، فنرها و موارد دیگر تشکیل شوند
شرایط میرایی یا داشپات را می توان برای مشخص نمودن ضرر در حرکت نسبی در مفصل تعریف کرد
برای توصیف حرکت نسبی بین اجزای می توان از اتصالات استفاده نمود.
از بین رفتن اصطحکاک به مفصل می تواند برای انواع مفصل در نظر گرفته شود: مفصل کشویی ، لولا ، استوانه ، پیچ ، مسطح و توپ.شرایط cam
نیروها و تکانه ها را می توان در انواع اتصالات اجزاء به کار برد
مکانیسم ها را می توان برای انتقال و چرخش صحیح با سرعت های داده شده در مرکز مشخص شده چرخش آغاز کرد.
بخش كتابخانه با قطعات هندسي پارامتري براي چرخ دنده هاي داخلي ، چرخ دنده هاي خارجي و قفسه ها جهت استفاده در پروژه ها موجود است
حوزه های کاربرد
هوافضا
اتومبیل
دینامیک موتور
مکاترونیک
رباتیک
بیومکانیک
ابزارهای زیست پزشکی
دینامیک خودرو
شبیه سازی دینامیک عمومی مجموعه های مکانیکی
pdf آموزش کامل این بخش (زبان اصلی)
![]()


{kind=link}